JWZ-EBM Full барқ дамидани мошин

БАРТАРИЯХОИ КОР
1.Системаи пурраи барқ, сарфаи энергия ва ҳифзи муҳити зист, 50% ~ 60% сарфаи энергия дар муқоиса бо системаи гидравликӣ.
2.Драйви мотории Servo, дақиқии баланди ҳаракат, вокуниши зуд, оғоз ва қатъи устувор бидуни таъсир.
3.Бо истифода аз назорати фельдбус, тамоми мошин ба система ворид карда мешавад, ки метавонад маълумоти корбарии мизбон ва мошини ёрирасонро дар вақти воқеӣ назорат кунад ва ҷамъоварӣ ва идоракунии маълумотро амалӣ кунад.
4.Каҷи тасҳеҳи динамикии бисёрнуқтаи ғафсии девор, насби автоматии маълумот, гузариши ҳамвори навъи ҷанин.
5.The extruder қабул мехи печдор самаранокии баланд, баромади баланд, истеъмоли энергия кам.
6.Using jwell насли панҷуми U сохтори тазиқи навъи, қувваи clamping яксон ва устувор.
7.Кӯтоҳ сикли қолаби ва иҷрои сардшавии баланд.
8. Истеҳсоли худкор, самаранок кам кардани хароҷоти кормандон ва хароҷоти идоракунӣ.
9.No ихроҷ, таҷҳизоти пасти садо, ки барои хӯрокворӣ, доруворӣ, косметика ва дигар маҳсулот бо талаботи баланд ба тозагӣ мувофиқанд.
10.Молд ва дастгоҳи вагон нигоҳдории оддӣ, арзиши паст, метавонад назорати моменти калон ноил.
Функсияҳои ихтиёрӣ
1.Чандқабата, бисёрқабата
2.Weighing системаи маводи ғизоӣ
Системаи ивазкунандаи экрани 3.5
4.Онлайн ошкор кардани ихроҷ, ошкоркунии визуалӣ, бастабандӣ ва дигар таҷҳизоти автоматикунонӣ


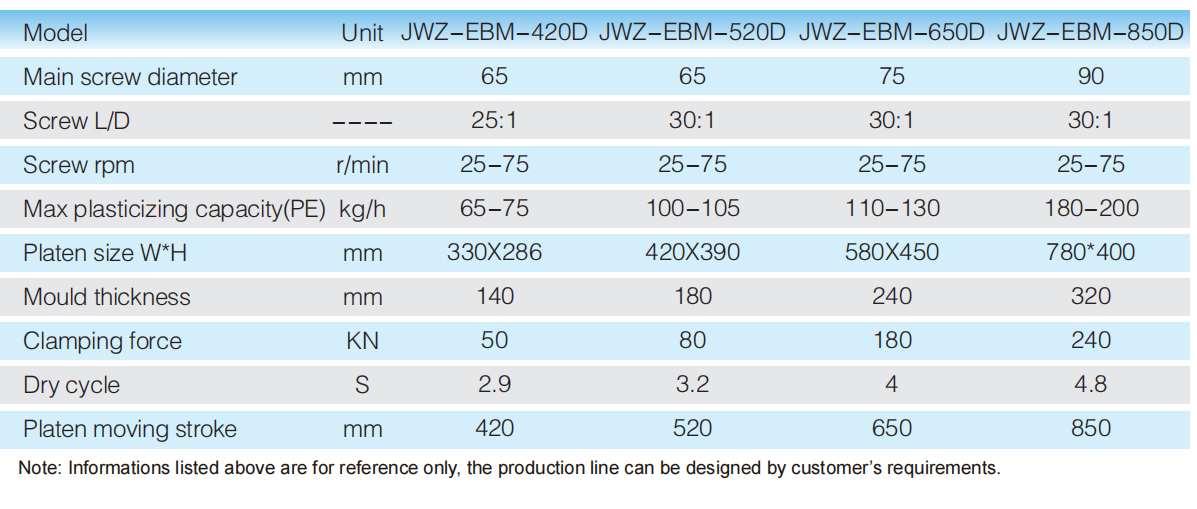
Параметрҳои техникӣ